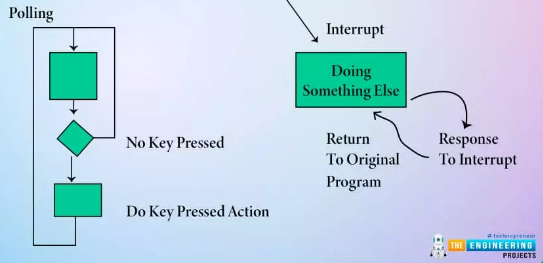
인터럽트 개요 개요 이전까지는 이벤트(프로그램이나 시스템 내에서 발생하는 특정한 상황이나 사용자의 액션)를 체크하기 위해 프로그램이 돌아가는 동안 이를 주기적으로 체크하는 방식을 사용했다. 예를 들어, 스위치를 눌러 왕복하고 있던 LED의 방향을 바꾸거나, FND의 출력 상태를 바꾸는 등의 작업이 해당된다. 이처럼 CPU가 주기적으로 이벤트를 확인하고 동작을 수행하는 것을 폴링(Polling)이라고 한다. 과연 이 방식이 효율적일까? 주기적으로 하드웨어 장치의 상태를 검사하며 변화가 있는지 확인하기 때문에, 프로그램의 흐름이 예측이 가능하며, 검사 시간과 간격을 프로그래머가 제어할 수 있다. 즉, 동기성을 갖고 있는 폴링 방식은 변화가 없을 때도 계속해서 상태를 검사하기 때문에 CPU 자원을 낭비하기 십..